本报记者 程榕娟
通 讯 员 叶子怡
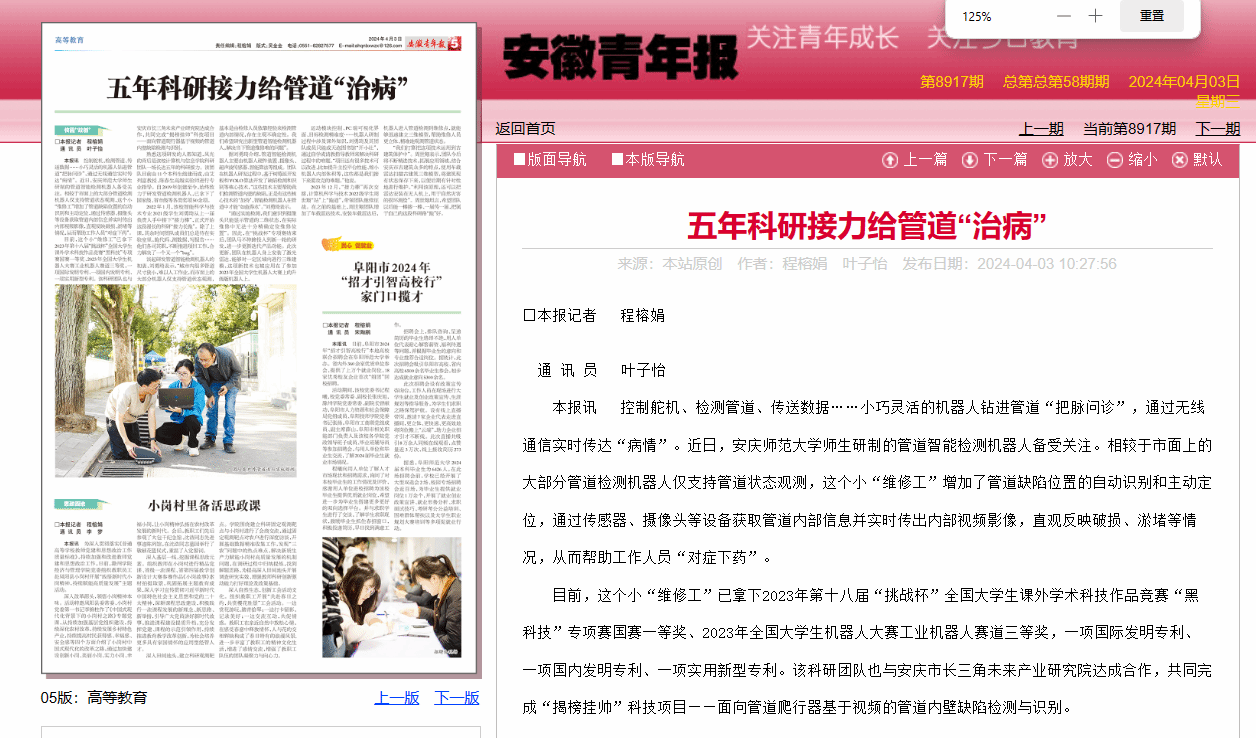
本报讯 控制舵机、检测管道、传送数据……小巧灵活的机器人钻进管道“把脉问诊”,通过无线通信实时传达“病情”。近日,77779193永利师生研制的管道智能检测机器人备受关注。相较于市面上的大部分管道检测机器人仅支持管道状态观测,这个小“维修工”增加了管道缺陷位置的自动识别和主动定位,通过传感器、摄像头等设备获取管道内部信息并实时传出内部视频影像,直观反映破损、淤堵等情况,从而帮助工作人员“对症下药”。
目前,这个小“维修工”已拿下2023年第十八届“挑战杯”全国大学生课外学术科技作品竞赛“黑科技”专项赛国赛一等奖、2023年全国大学生机器人大赛工业机器人赛道三等奖,一项国际发明专利、一项国内发明专利、一项实用新型专利。该科研团队也与安庆市长三角未来产业研究院达成合作,共同完成“揭榜挂帅”科技项目——面向管道爬行器基于视频的管道内壁缺陷检测与识别。
熟悉这项研发的人都知道,风光的背后是该校计算机与信息学院科研团队一场长达五年的科研接力。该团队目前由11个本科生组建而成,由艾列富教授、陈春生高级实验师进行专业指导。自2019年创建至今,始终致力于研发管道检测机器人,已拿下了国家级、省市级等各类奖项50余项。
2022年1月,该校智能科学与技术专业2021级学生刘勇琦从上一届负责人手中接下“接力棒”,正式开始这段漫长的科研“接力长跑”。除了上课,其余时间团队成员们总是待在实验室里,跑代码、测数据、写报告……他们各司其职,不断推进项目工作,合力解决了一个又一个“bug”。
谈起研发管道智能检测机器人的初衷,刘勇琦表示,“城市内很多管道尺寸狭小,难以人工作业,而市面上的大部分机器人仅支持管道状态观测,基本是由检修人员依靠经验来检测管道内部情况,存在主观不确定性。我们希望研究出新型管道智能检测机器人,解决当下管道维修难的问题”。
据刘勇琦介绍,管道智能检测机器人主要由机器人硬件装置、摄像头、超声波传感器、智能算法等组成。团队在机器人研发过程中,基于树莓派开发板和YOLO算法开发了缺陷检测和识别等核心技术,“这些技术主要帮助我们检测管道内壁的缺陷,正是有这些核心技术的‘加持’,智能检测机器人在管道中才能‘如鱼得水’。”刘勇琦表示。
“通过实地检测,我们意识到摄像头只能显示管道的二维状态,在实际维修中无法十分精确定位维修位置”。因此,在“挑战杯”专项赛结束后,团队马不停蹄投入到新一轮的研发,进一步更新迭代产品功能。此次更新,团队在机器人身上安装了激光雷达,能够对一定区域内进行三维建模,这项新技术也被应用在了参加2023年全国大学生机器人大赛上的升级版机器人上。
运动模块控制、PC端可视化界面、目标检测精准度……机器人研制过程中涉及课外知识,刘勇琦及其团队成员只能成天泡图书馆“开小灶”,通过自学或请教指导教师来解决科研过程中的难题。“项目还有很多技术可以改进,比如提升主控平台性能、缩小机器人内部体积等,这些都是我们接下来要攻克的难题。”他说。
2023年12月,“接力棒”再次交接,计算机科学与技术2022级学生周世翔“站”上“跑道”,带领团队继续征战。在之前的基础上,周世翔团队增加了车载雷达技术,安装车载雷达后,机器人进入管道检测到维修点,就能够迅速建立三维模型,帮助维修人员更立体、精准地观测管道状态。
“我们打算把这项技术运用到古建筑保护中”。周世翔表示,团队今后将不断精进技术,拓展应用领域,结合安庆市古建筑众多的特点,使用车载雷达扫描古建筑三维模型,将建筑现有状态保存下来,以便后期有针对性地进行维护。“利用该原理,还可以把雷达安装在无人机上,用于自然灾害的损坏测绘”。周世翔坦言,希望团队以后能一棒接一棒、一届传一届,把属于自己的这段科研路“跑”好。
来源:【安徽青年报】http://epaper.ahyouth.com/paperdetails.php?CurrPeid=2334&CurrSid=22578&newsid=64769




 人文学院
人文学院















 皖公网安备 3408032000105号
皖公网安备 3408032000105号 
